역사적 가치가 있는 건축물이나 형태가 복잡한 비정형 건축물, 플랜트 시설에서 수많은 설비시설에 관한 현황의 측량이 필요한 경우 기존의 방법으로는 이를 정확하게 구현해 내는 것이 어려운 경우가 많다. 이런 경우 효율적으로 사용할 수 있는 도구로 3D 레이저 스캐너가 있다.
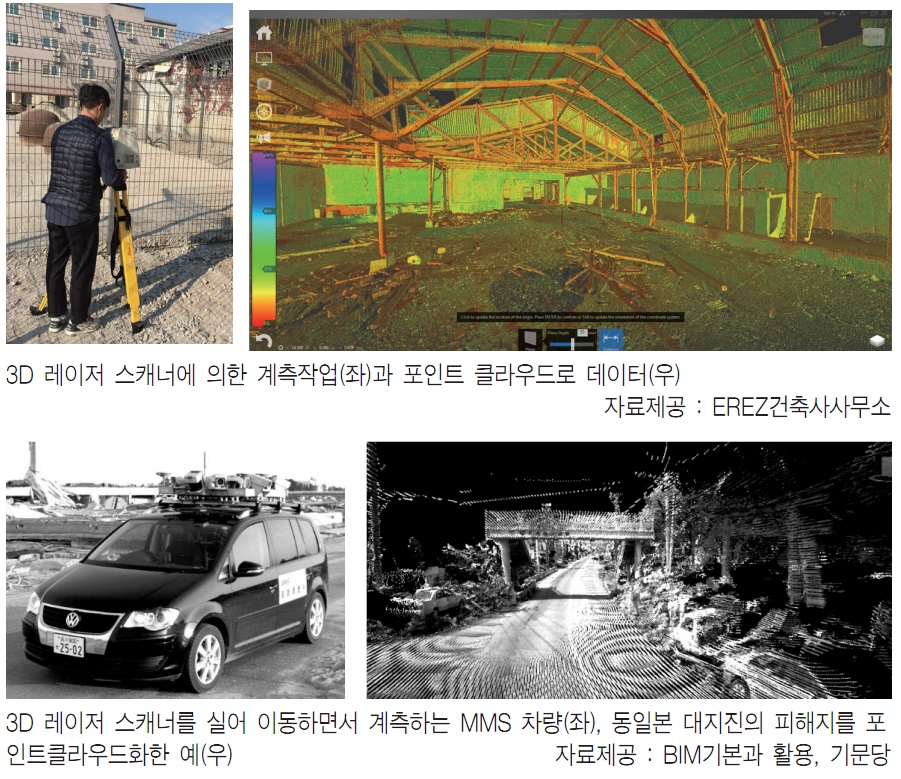
3D 레이저 스캐너는 측량기기의 일종으로 건물이나 설비기기 등의 표면에 수 센티미터 간격으로 초당 수만~수십만 회의 레이저 광선을 비추고 되돌아온 정보들로 구성된 3차원 좌표점 데이터의 집합체로 ‘포인트 클라우드’라는 데이터가 된다. 이 포인트 클라우드를 전용 소프트웨어를 통해 보면 마치 건물의 형태가 무수한 점들의 집합으로 보이기 때문에 ‘점군’이라고도 부른다.
3D 레이저 스캐너는 카메라와 같은 요령으로 제한된 화각을 가지며 1회 촬영에 따른 제한된 계측범위가 있다. 따라서 하나의 건물을 계측할 때에는 3D 스캐너의 위치를 바꾸면서 사각이 생기지 않도록 여러 각도에서 반복해서 건물을 계측하고, 그 후에 다수의 포인트 클라우드 데이터를 하나로 합성함으로써 건물 전체의 포인트 클라우드 데이터를 만든다.
건축에서의 포인트 클라우드 데이터의 주요 용도로는 크게 다음의 세 가지로 많이 활용된다. 첫째, 증개축 혹은 문화재 기록 보존 시 도면이 남아 있지 않거나 실제 현장을 정밀하게 실측해야 할 필요가 있는 경우 3D 레이저 스캐너로 촬영한 실제 건물의 형상을 컴퓨터로 불러들여 BIM모델이나 현황도면을 작성할 수 있다. 둘째, 건설현장 주변을 돌면서 계측한 포인트 클라우드 데이터에는 인접한 건물의 형태나 시공에 장애가 되는 전선 등도 상세히 기록되어 있다. 따라서 인접하는 건물의 프라이버시 및 채광 등을 고려한 설계나 시공 시의 장비 진출입이나 타워크레인 작업반경 등, 시공 시뮬레이션에도 활용할 수 있다. 셋째, 플랜트 시설, 기계실 등의 포인트 클라우드 데이터는 포인트 클라우드인 채로 보일러나 냉동기 등의 기기별로 잘라내어 포인트 클라우드의 블록형태로 작성하여 기계실 개보수 시에 기기의 배치 검토를 할 수 있고 장비투입시 간섭체크 등을 별도의 작업 없이 포인트 클라우드 상태에서 바로 실행하는 것도 가능하다.
이러한 3D 레이저 스캐너 기술을 더 확장하여 장비를 자동차에 실어 운행하면서 도로의 노면이나 주위의 거리풍경을 계측하는 모바일 맵핑 시스템(MMS), 비행기에 실어서 지표나 건물 등을 광범위하게 3차원 계측하는 항공 레이저 계측 등 이동식도 있다. 또한 드론의 가격과 성능이 좋아짐에 따라 개인용 보급률이 높아지고 있다. 이러한 기술들을 조합하여 잘 사용한다면 부지 분석 및 현황 파악을 보다 스마트하게 하는 것이 가능하며 새로운 업역의 창출도 가능할 것이라 기대한다.